A point cloud is a 3D model that consists of a large number of points in three-dimensional space. Point clouds use the Cartesian coordinate system (X, Y, Z) to define the position of each point. These points represent a point on the surface of an object, defining the shape of the object being modelled. The more dense the points, the more detailed the representation of the object is, which allows smaller features and texture details to be more clearly and accurately defined.
How a Point Cloud is Made
 Point clouds are primarily created using 3D scanners. Depending on the size of the object and the desired level of detail, it can take anywhere from a few thousand to a few billion data points to create an accurate point cloud.
Point clouds are primarily created using 3D scanners. Depending on the size of the object and the desired level of detail, it can take anywhere from a few thousand to a few billion data points to create an accurate point cloud.
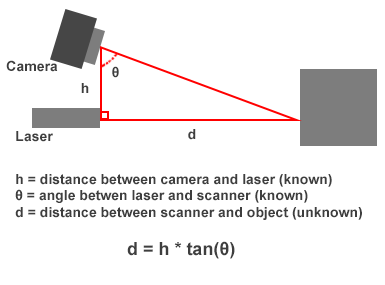
Depending on the 3D scanning technology, a laser or light projector is focused on an object. By utilizing simple arithmetic, such as triangulation or time of flight, the coordinates of points on the object’s surface will be calculated in relation to the position of the 3D scanner. Points are able to be collected hundreds or thousands at a time with 3D scanning so that clusters of data points are created quickly.
These data points are immediately uploaded into a specialized 3D scanning software that renders the points in real time. This is usually just the start of a point cloud’s creation as most objects require that multiple scans be taken from different viewpoints and combined in the software later. This is because a 3D scanner can only record data points for the surface within the scanner’s line of sight and the object may need to be rotated and scanned several times to capture the entirety of its geometry. Once the scans have been combined, you will have a complete point cloud to represent your object in 3D space. Again, the level of detail of the point cloud will depend on the density of the data points.
The Purpose of a Point Cloud
A point cloud can be seen as a type of stepping stone to go from a 3D scan to usable CAD. As such, point clouds are most often used as the basis for creating polygonal mesh models and, ultimately, CAD files.
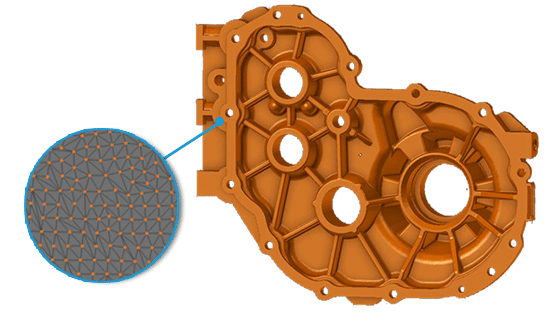 A polygonal mesh model is created by connecting all of the dots in a point cloud with lines to form triangles. Thousands or millions of these triangles define the surface of the part. If your point cloud is more dense, more triangles will be made, which will allow even the smallest of details to be accurately defined in the mesh model. Polygonal mesh models are commonly used for dimensional analysis and 3D printing. They may also be used for reverse engineering since CAD models can easily be made from a mesh.
A polygonal mesh model is created by connecting all of the dots in a point cloud with lines to form triangles. Thousands or millions of these triangles define the surface of the part. If your point cloud is more dense, more triangles will be made, which will allow even the smallest of details to be accurately defined in the mesh model. Polygonal mesh models are commonly used for dimensional analysis and 3D printing. They may also be used for reverse engineering since CAD models can easily be made from a mesh.
Essentially, unless you are designing CAD from scratch, a point cloud is needed to create any type of digital 3D model of an existing object. Mesh models for 3D printing and CAD files for digital inventory and print-on-demand of existing parts would not be possible without point clouds.
It is important to note that when making meshes and CAD models from a point cloud that a higher quality, or more dense, point cloud will yield better results than a sparse point cloud of the same object. For this reason, parts with small features will demand many more data points to accurately define them than simple, flat-faced parts will.
3D Scanning at 3 Space
Here at 3 Space, we offer many 3D scanning services, including dimensional analysis and reverse engineering. Our expert engineers and top-of-the-line 3D laser scanner and structured light 3D scanners will ensure you get the best quality scan and 3D model possible. For more information, contact us today.